
Heaps
힙(Heap)은 특정한 구조적 및 정렬 속성을 가진 이진 트리의 일종. 힙은 주로 우선순위 큐 구현에 많이 사용됨
완전 이진 트리: 힙은 완전 이진 트리의 형태를 가져야 함. 이는 모든 레벨이 완전히 채워져 있으며, 마지막 레벨에서는 왼쪽부터 오른쪽으로 노드가 배치되어 있어야 한다. 이 속성 덕분에 배열로 효율적으로 표현될 수 있으며, 트리의 높이를 최소화하여 접근 및 삽입, 삭제 작업의 성능을 향상시킬 수 있음.
가장 큰 element는 root가 된다. root가 max면 max heap, min이면 min heap이다.
정렬 속성 (Order Property)
최대 힙 (Max Heap): 각 노드의 값이 그 자식 노드의 값보다 크거나 같은 경우입니다. 즉, 루트 노드가 가장 큰 값을 가지며, 모든 부모 노드는 자식 노드보다 큰 값을 가진다.
최소 힙 (Min Heap): 각 노드의 값이 그 자식 노드의 값보다 작거나 같은 경우입니다. 즉, 루트 노드가 가장 작은 값을 가지며, 모든 부모 노드는 자식 노드보다 작은 값을 가진다.
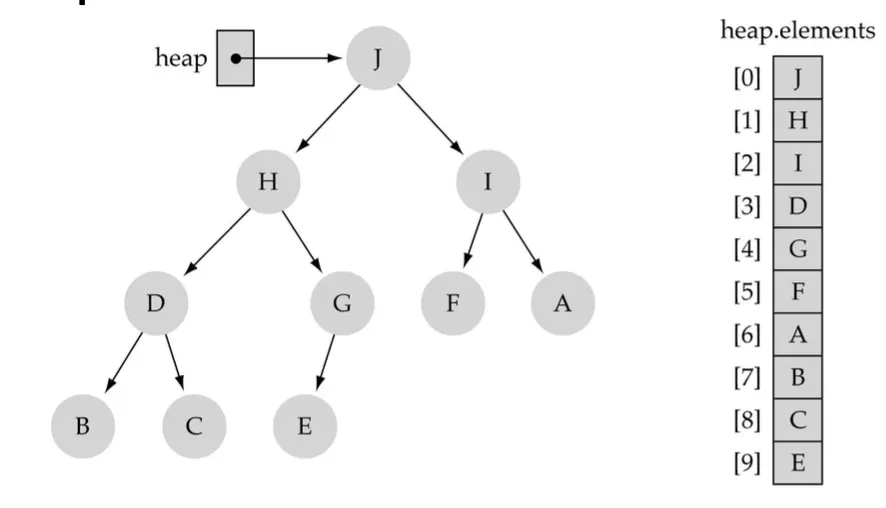
Complete binary Tree이므로 array로 표현하기 쉽다.
Heap Specification
template <class ItemType> struct HeapType {
void ReheapDown(int root, int bottom);
void ReheapUp(int root, int bottom);
ItemType *elements; // ARRAY to be allocated dynamically
int numElements;
};
C++
복사
Reheap
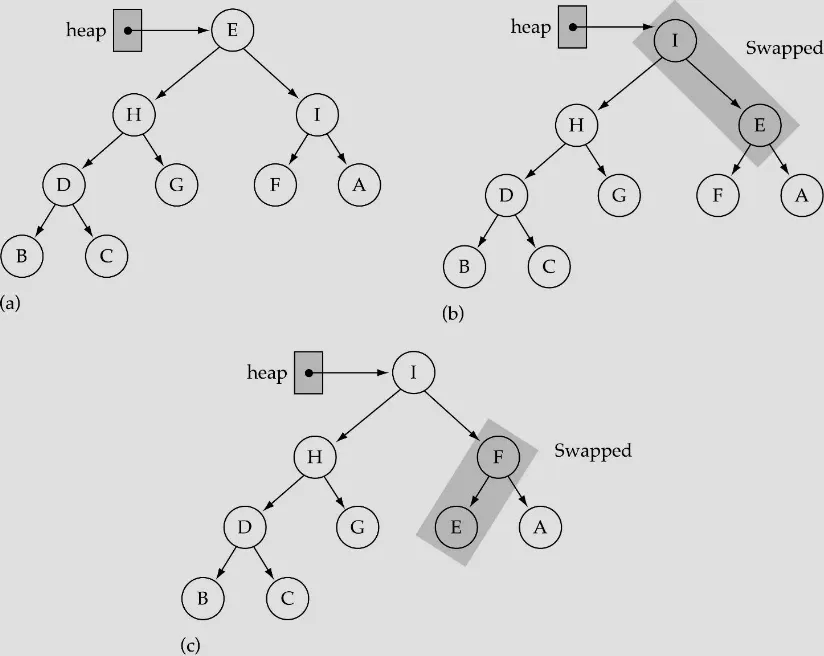
heap조건이 깨지는 경우 다시 heap으로 만드는 것.
ReHeapDown: deleteItem 수행시에 사용됨. 삭제된 노드의 자리를 채우기 위해서 노드가 자식 노드와 비교해서 적절한 위치로 내려감.
template <class ItemType>
void HeapType<ItemType>::ReheapDown(int root, int bottom)
// Pre: root is the index of the node that may violate the
// heap order property
// Post: Heap order property is restored between root and bottom
{
int maxChild;
int rightChild;
int leftChild;
leftChild = root * 2 + 1;
rightChild = root * 2 + 2;
if (leftChild <= bottom) // Is there leftChild?
{
if (leftChild == bottom) // only one child
maxChild = leftChld;
else // two children
{
if (elements[leftChild] <= elements[rightChild])
maxChild = rightChild;
else
maxChild = leftChild;
}
if (elements[root] < elements[maxChild]) {
Swap(elements[root], elements[maxChild]);
ReheapDown(maxChild, bottom);
}
}
}
C++
복사
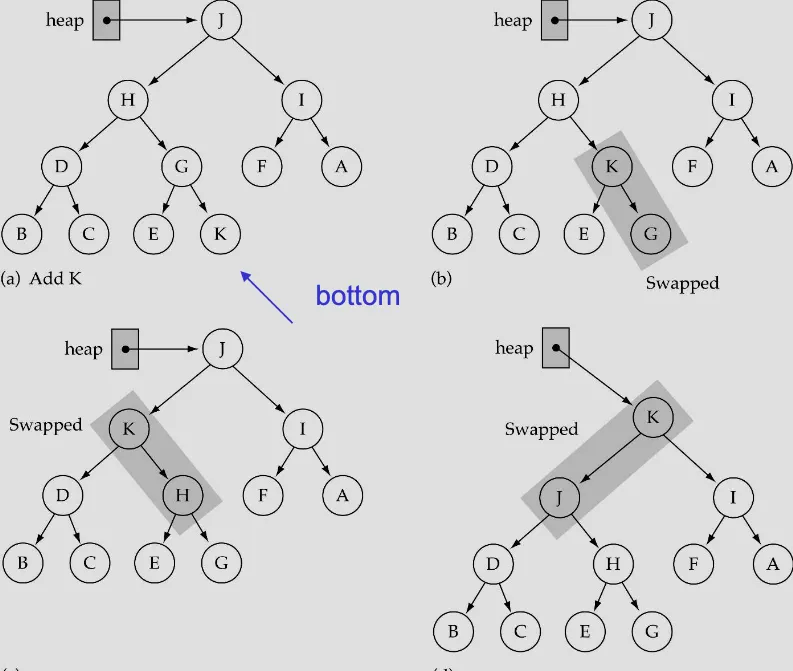
ReHeapUp: InsertItem 수행시에 사용됨. 삽입된 노드가 부모노드와 비교하여 적절한 위치로 올라감.
template <class ItemType>
void HeapType<ItemType>::ReheapUp(int root, int bottom)
// Pre: bottom is the index of the node that may violate the heap
// order property. The order property is satisfied from root to
// next-to-last node.
// Post: Heap order property is restored between root and bottom
{
int parent;
if (bottom > root) // tree is not empty
{
parent = (bottom - 1) / 2;
if (elements[parent] < elements[bottom]) {
Swap(elements[parent], elements[bottom]);
ReheapUp(root, parent);
}
}
}
C++
복사
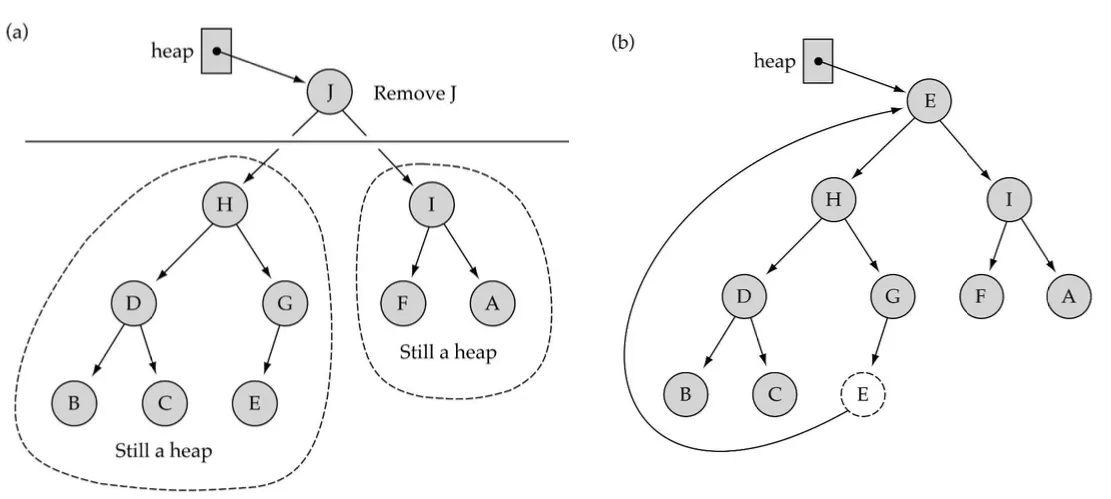
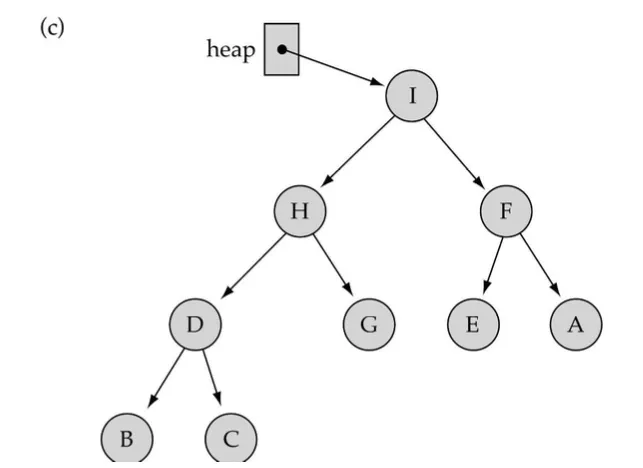
가장 큰 element 삭제
1.
리프노드의 가장 오른쪽에 존재하는 값을 루트로 복사
2.
가장 오른쪽 값을 삭제
3.
ReHeapDown을 호출해서 값 수정
Inserting a new element into the heap
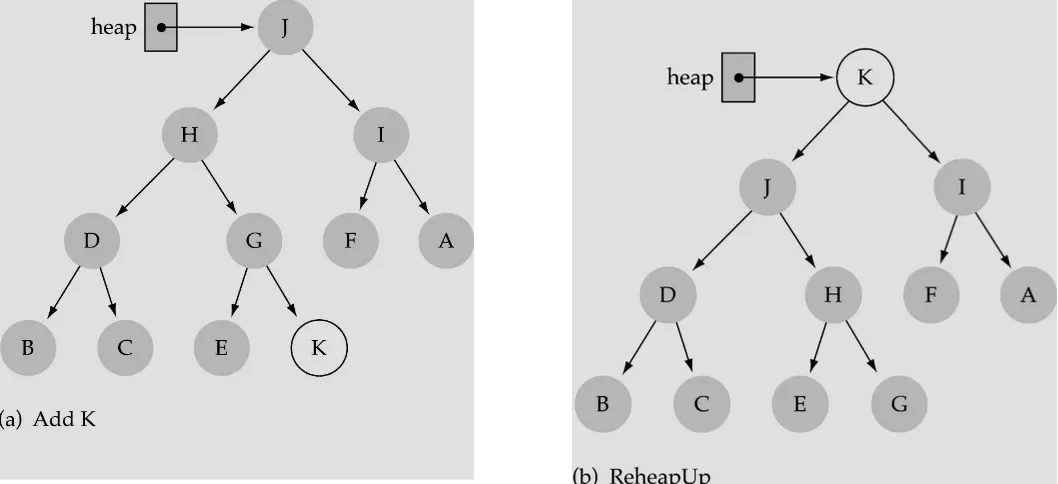
1.
bottom leftmost에 insert
2.
ReheapUp수행
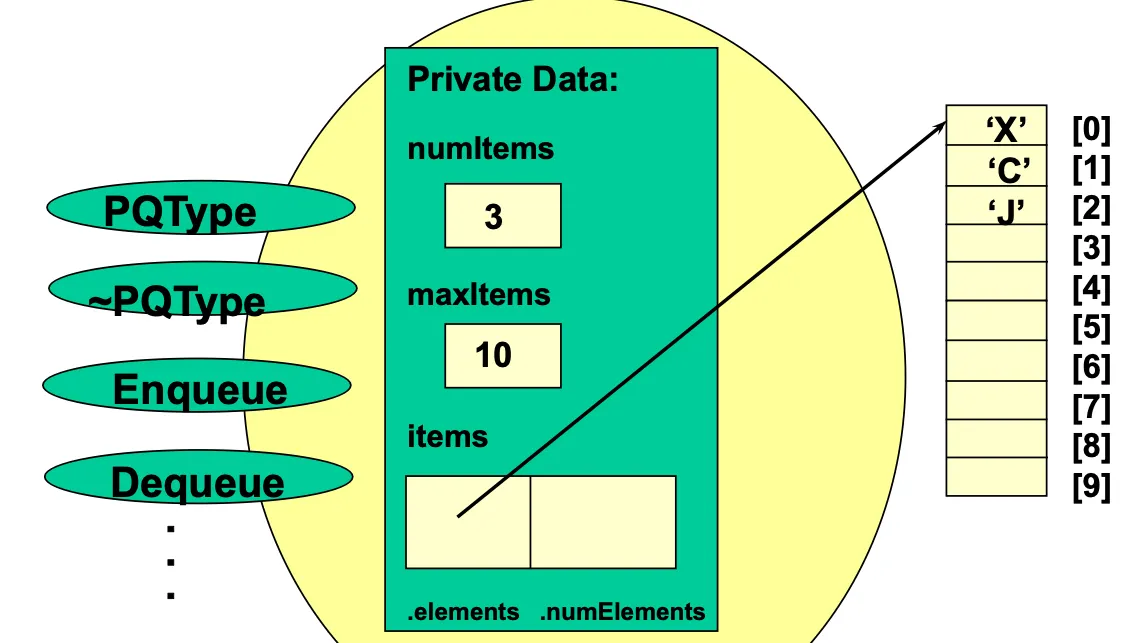
Priority Queue
class FullPQ(){};
class EmptyPQ(){};
template <class ItemType> class PQType {
public:
PQType(int);
~PQType();
void MakeEmpty();
bool IsEmpty() const;
bool IsFull() const;
void Enqueue(ItemType newItem);
void Dequeue(ItemType &item);
private:
int length;
HeapType<ItemType> items;
int maxItems;
};
template <class ItemType> PQType<ItemType>::PQType(int max) {
maxItems = max;
items.elements = new ItemType[max];
length = 0;
}
template <class ItemType> void PQType<ItemType>::MakeEmpty() { length = 0; }
template <class ItemType> PQType<ItemType>::~PQType() {
delete[] items.elements;
}
C++
복사
우선순위 큐는 추상 데이터타입으로 가장 높은 우선순위를 가진 요소만을 언제든지 접근할 수 있는 구조.
구현 방법
1.
비정렬 리스트 (Unsorted List)
장점: 삽입 연산이 O(1)로 빠릅니다.
단점: 삭제(Dequeuing) 시 가장 높은 우선순위를 가진 요소를 찾기 위해 전체 리스트를 검색해야 하므로
O(N)의 시간이 필요합니다.
2.
배열 기반 정렬 리스트 (Array-Based Sorted List)
장점: 삭제 시 가장 높은 우선순위를 가진 요소를 쉽게 찾을 수 있어 O(1)의 시간이 걸립니다.
단점: 삽입 시 리스트의 정렬 상태를 유지해야 하므로 O(N)의 시간이 필요합니다.
3.
연결 정렬 리스트 (Linked Sorted List)
장점: 삭제 시 빠르게 접근할 수 있으며, 정렬 상태를 유지하는 동안 삭제 연산이 O(1)로 가능합니다.
단점: 삽입 시에도 정렬을 유지해야 하므로 O(N)의 시간이 걸립니다.
4.
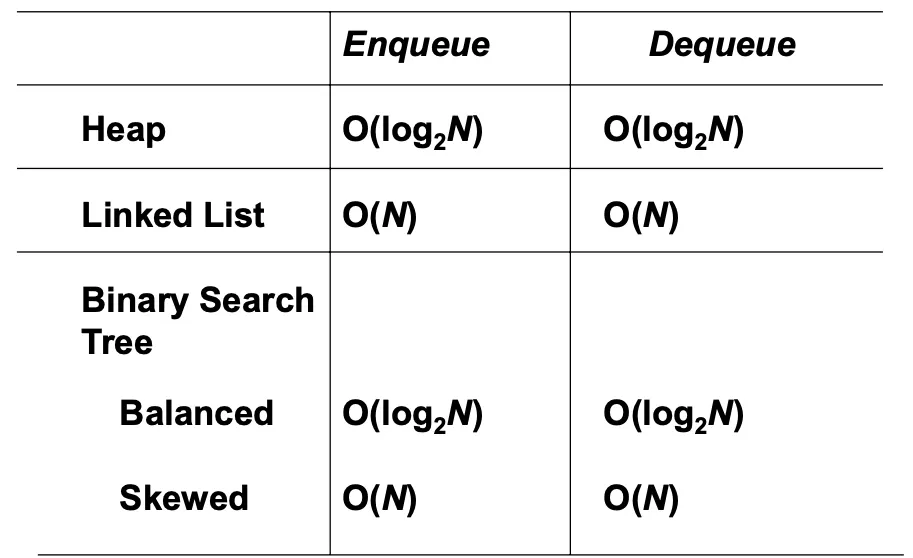
이진 검색 트리 (Binary Search Tree)
장점: 평균적으로 삽입과 삭제 연산이 O(logN)의 시간이 걸립니다.
단점: 최악의 경우(편향된 트리)에는 O(N)의 시간이 걸릴 수 있습니다.
5.
힙 (Heap)
장점: 삽입과 삭제 연산 모두 O(logN)의 시간이 걸리며, 최악의 경우에도 이 시간 복잡도를 보장합니다.
특히, 힙은 완전 이진 트리 구조이기 때문에 배열로도 쉽게 구현할 수 있습니다.
단점: 추가적인 메모리 오버헤드가 발생할 수 있습니다.
Dequeue, Enqueue
template <class ItemType> void PQType<ItemType>::Dequeue(ItemType &item) {
if (length == 0)
throw EmptyPQ();
else {
item = items.elements[0];
items.elements[0] = items.elements[length - 1];
length--;
items.ReheapDown(0, length - 1);
}
}
template <class ItemType> void PQType<ItemType>::Enqueue(ItemType newItem) {
if (length == maxItems)
throw FullPQ();
else {
length++;
items.elements[length - 1] = newItem;
items.ReheapUp(0, length - 1);
}
}
C++
복사
Graphs

그래프(Graph)는 노드(또는 정점, vertices)와 이들 간의 관계를 나타내는 엣지(edges)로 구성된 데이터 구조로다양한 형태의 관계를 모델링하는 데 유용하다.
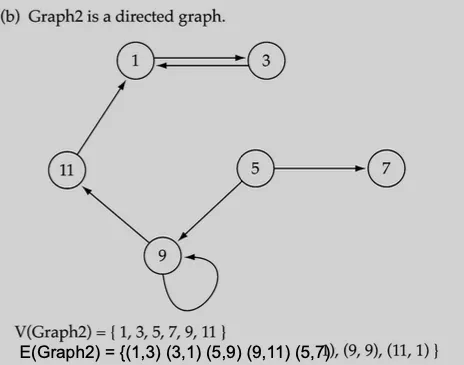
V(G): 유한하며 비어 있지 않은 정점의 집합. 이 정점들은 그래프의 노드이다.
E(G): 정점 간의 관계를 나타내는 엣지의 집합. 각 엣지는 두 정점의 쌍으로 표현함.
Graph의 종류
•
Undirected Graph = 그래프의 엣지에 방향이 없는 경우.

•
Directed graph(digraph) = 그래프의 엣지에 방향이 있는 경우. 각 edge들의 순서가 중요함
Trees vs Graphs
Tree는 graph의 special case. 트리는 cycle이 없는 연결된 그래프.
Graph terminology
1.
Adjacent nodes(인접노드): 두 노드가 엣지로 연결되어 있을 때, 노드들이 서로 인접하다고 함.
2.
Path(경로): 그래프에서 두 노드를 연결하는 정점의 순서. 경로는 정잠간의 이동을 나타내며 경로의 길이는 포함된 엣지의 개수.
3.
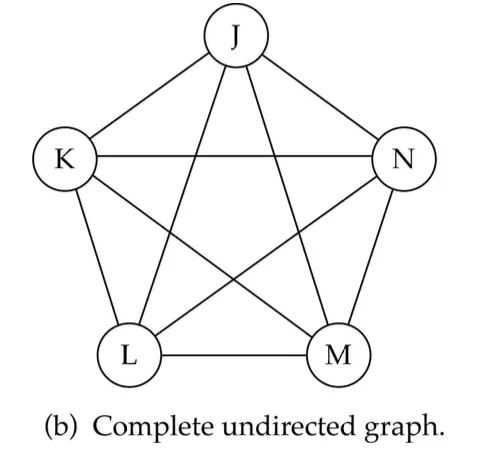
Complete Graph(완전 그래프): 모든 정점이 서로 직접 연결된 그래프. 정점의 수가 n개일 때, 완전그래프의 엣지의 수는 n(n-1)개 ⇒ directed의 경우, n(n-1)/2개 ⇒ undirected의 경우

4.
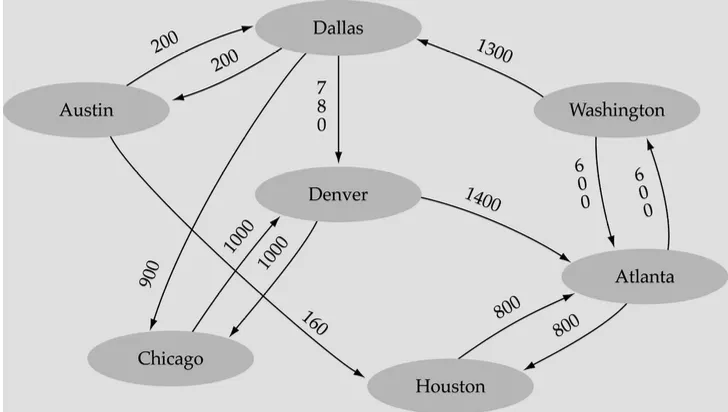
Weighted graph(가중치 그래프): 그래프의 각 edge에 값이 부여된 그래프
Graph Implementation
Adjacency Matrix(인접행렬)
1D 배열: 정점(노드)의 집합을 나타내기 위해 1차원 배열을 사용합니다. 배열의 인덱스는 각 정점을 나타냅니다.
2D 배열: 인접 행렬을 사용하여 엣지를 나타냅니다. 이 행렬의 크기는 n×n이며, n은 정점의 수입니다. 행렬의 요소 matrix[i][j]는 정점 i와 정점 j 간의 엣지가 존재하는지 여부를 나타냄.
메모리 사용량이 많고 sparse graph인 경우 비효율적.
– Good for dense graphs --|E|~O(|V|2)
– Memory requirements: O(|V| + |E| ) = O(|V|2 )
– Connectivity between two vertices can be tested quickly

Adjacency List
정점의 집합을 나타내기 위해 1차원 배열을 사용. 각 배열 요소는 해당 정점에 대한 인접 리스트의 시작점을 가리킴
– Good for sparse graphs -- |E|~O(|V|)
– Memory requirements: O(|V| + |E|)=O(|V|)
– Vertices adjacent to another vertex can be found quickly

Graph Specification - Adjacancy Matrix
// Adjacency Matrix 기반
const int NULL_EDGE = 0;
template <class VertexType> class GraphType {
public:
GraphType(int);
~GraphType();
void MakeEmpty();
bool IsEmpty() const;
};
bool IsFull() const;
void AddVertex(VertexType);
void AddEdge(VertexType, VertexType, int);
int WeightIs(VertexType, VertexType);
void GetToVertices(VertexType, QueType<VertexType> &);
void ClearMarks();
void MarkVertex(VertexType);
bool IsMarked(VertexType) const;
template <class VertexType> GraphType<VertexType>::GraphType(int maxV) {
numVertices = 0;
maxVertices = maxV;
vertices = new VertexType[maxV];
edges = new int[maxV];
for (int i = 0; i < maxV; i++)
edges[i] = new int[maxV];
marks = new bool[maxV];
}
template <class VertexType> GraphType<VertexType>::~GraphType() {
delete[] vertices;
for (int i = 0; i < maxVertices; i++)
delete[] edges[i];
delete[] edges;
delete[] marks;
}
void GraphType<VertexType>::AddVertex(VertexType vertex) {
vertices[numVertices] = vertex;
for (int index = 0; index < numVertices; index++) {
edges[numVertices][index] = NULL_EDGE;
edges[index][numVertices] = NULL_EDGE;
}
numVertices++;
template <class VertexType>
void GraphType<VertexType>::AddEdge(VertexType fromVertex,
VertexType toVertex, int weight)
}
{
int row;
int column;
row = IndexIs(vertices, fromVertex);
col = IndexIs(vertices, toVertex);
edges[row][col] = weight;
}
template <class VertexType>
int GraphType<VertexType>::WeightIs(VertexType fromVertex,
VertexType toVertex) {
int row;
int column;
row = IndexIs(vertices, fromVertex);
col = IndexIs(vertices, toVertex);
return edges[row][col];
}
C++
복사
Graph Specification - Adjacency list
#include <iostream>
#include <vector>
#include <list>
#include <unordered_map>
#include <queue>
template <class VertexType>
class GraphType {
public:
GraphType(int maxV);
~GraphType();
void MakeEmpty();
bool IsEmpty() const;
bool IsFull() const;
void AddVertex(VertexType vertex);
void AddEdge(VertexType fromVertex, VertexType toVertex, int weight);
int WeightIs(VertexType fromVertex, VertexType toVertex);
void GetToVertices(VertexType vertex, std::queue<VertexType>& vertexQueue);
void ClearMarks();
void MarkVertex(VertexType vertex);
bool IsMarked(VertexType vertex) const;
private:
int numVertices;
int maxVertices;
std::unordered_map<VertexType, std::list<std::pair<VertexType, int>>> edges; // Adjacency list
std::unordered_map<VertexType, bool> marks; // Marks for vertices
int IndexIs(VertexType vertex);
};
template <class VertexType>
GraphType<VertexType>::GraphType(int maxV) : maxVertices(maxV), numVertices(0) {}
template <class VertexType>
GraphType<VertexType>::~GraphType() {
MakeEmpty();
}
template <class VertexType>
void GraphType<VertexType>::MakeEmpty() {
edges.clear();
marks.clear();
numVertices = 0;
}
template <class VertexType>
bool GraphType<VertexType>::IsEmpty() const {
return numVertices == 0;
}
template <class VertexType>
bool GraphType<VertexType>::IsFull() const {
return numVertices == maxVertices;
}
template <class VertexType>
void GraphType<VertexType>::AddVertex(VertexType vertex) {
if (IsFull()) {
std::cerr << "Graph is full!" << std::endl;
return;
}
if (edges.find(vertex) == edges.end()) {
edges[vertex] = std::list<std::pair<VertexType, int>>();
numVertices++;
}
}
template <class VertexType>
void GraphType<VertexType>::AddEdge(VertexType fromVertex, VertexType toVertex, int weight) {
if (edges.find(fromVertex) != edges.end() && edges.find(toVertex) != edges.end()) {
edges[fromVertex].emplace_back(toVertex, weight);
edges[toVertex].emplace_back(fromVertex, weight); // For undirected graph
}
}
template <class VertexType>
int GraphType<VertexType>::WeightIs(VertexType fromVertex, VertexType toVertex) {
if (edges.find(fromVertex) != edges.end()) {
for (const auto& pair : edges[fromVertex]) {
if (pair.first == toVertex) {
return pair.second; // Return weight
}
}
}
return 0; // If no edge exists
}
template <class VertexType>
void GraphType<VertexType>::GetToVertices(VertexType vertex, std::queue<VertexType>& vertexQueue) {
if (edges.find(vertex) != edges.end()) {
for (const auto& pair : edges[vertex]) {
vertexQueue.push(pair.first); // Push adjacent vertices into the queue
}
}
}
template <class VertexType>
void GraphType<VertexType>::ClearMarks() {
marks.clear();
}
template <class VertexType>
void GraphType<VertexType>::MarkVertex(VertexType vertex) {
marks[vertex] = true; // Mark the vertex
}
template <class VertexType>
bool GraphType<VertexType>::IsMarked(VertexType vertex) const {
auto it = marks.find(vertex);
return it != marks.end() && it->second; // Check if marked
}
// Example IndexIs function (not used in adjacency list implementation)
template <class VertexType>
int GraphType<VertexType>::IndexIs(VertexType vertex) {
// Implementation of IndexIs can be added if needed for specific purposes
return -1; // Placeholder
}
C++
복사
Graph Searching
두 노드간의 경로를 찾는 문제. DFS, BFS가 있음
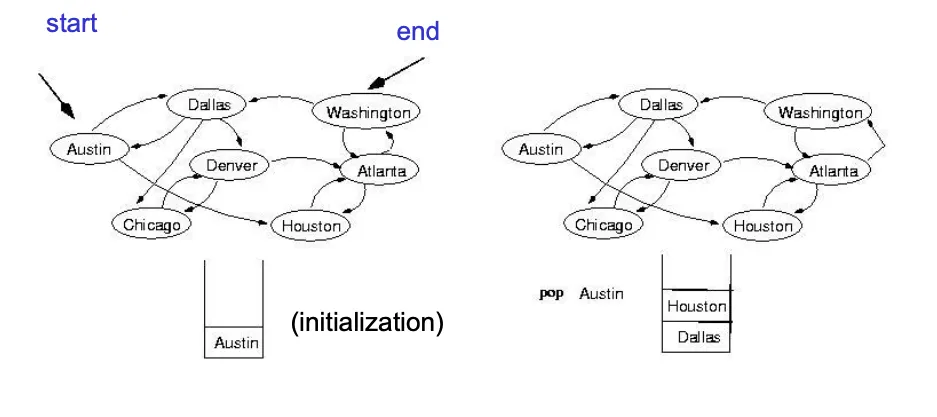
DFS (Depth First Search)
한가지 경로를 선택한 후 그 경로를 가능한 깊게 탐색함. 현재노드에서 자식 노드로 이동하며 더 이상 진행할 수 없을때까지 내려가고 더 이상 갈 수 없는 노드에 도달하면 이전 노드로 돌아가 다른 경로 탐색.
스택을 사용해서 효율적으로 구현할 수 있다.
template <class ItemType>
void DepthFirstSearch(GraphType<VertexType> graph, VertexType startVertex,
VertexType endVertex) {
StackType<VertexType> stack;
QueType<VertexType> vertexQ;
bool found = false;
VertexType vertex;
VertexType item;
graph.ClearMarks();
stack.Push(startVertex);
do {
stack.Pop(vertex);
if (vertex == endVertex)
found = true;
else {
if (!graph.IsMarked(vertex)) {
graph.MarkVertex(vertex);
graph.GetToVertices(vertex, vertexQ);
while (!vertexQ.IsEmpty()) {
vertexQ.Dequeue(item);
if (!graph.IsMarked(item))
stack.Push(item);
}
}
}
} while (!stack.IsEmpty() && !found);
if (!found)
cout << "Path not found" << endl;
}
template <class VertexType>
void vertex, GraphType<VertexType>::GetToVertices(
VertexType QueTye<VertexType> &adjvertexQ) {
int fromIndex;
int toIndex;
fromIndex = IndexIs(vertices, vertex);
for (toIndex = 0; toIndex < numVertices; toIndex++)
if (edges[fromIndex][toIndex] != NULL_EDGE)
adjvertexQ.Enqueue(vertices[toIndex]);
}
C++
복사
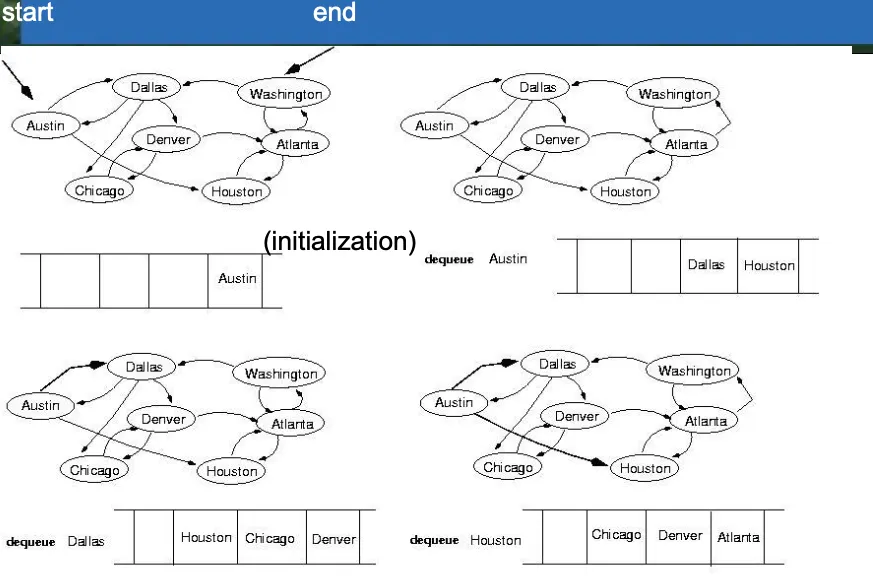
BFS (Breadth First Search)
너비우선탐색은 특정 노드에서 시작해서 모든 노드를 레벨별로 방문함. 레벨 우선 탐색.
한 레벨의 모든 노드를 방문하고 다음 레벨로 넘어간다. BFS는 큐를 사용해서 구현할 수 있다.
push전에 마킹을 수행하는게 좋다. 마크 체크 안하면 스택에 똑같은애가 여러번 들어갈 수 있다.
template <class VertexType>
void BreadthFirtsSearch(GraphType<VertexType> graph, VertexType startVertex,
VertexType endVertex);
{
QueType<VertexType> queue;
QueType<VertexType> vertexQ; //
bool found = false;
VertexType vertex;
VertexType item;
graph.ClearMarks();
queue.Enqueue(startVertex);
do {
queue.Dequeue(vertex);
if (vertex == endVertex)
found = true;
else {
if (!graph.IsMarked(vertex)) {
graph.MarkVertex(vertex);
graph.GetToVertices(vertex, vertexQ);
while (!vertxQ.IsEmpty()) {
vertexQ.Dequeue(item);
if (!graph.IsMarked(item))
queue.Enqueue(item);
}
}
}
} while (!queue.IsEmpty() && !found);
if (!found)
cout << "Path not found" << endl;
}
C++
복사
Shortest path problem
source vertex에서 destination vertex까지 경로의 total weigth의 합이 가장 작은 path를 구하는 문제
다익스트라, 벨만포드 알고리즘 등이 있음.
그래프에 가중치가 없으면 BFS가 shortest path를 구하는 알고리즘으로 사용될 수 있음
